VT CRO — SEC Mechanical Team Lead (2026)
Virginia Tech Competitive Robotics Organization · IEEE Southeastern Conference 2026
Overview
This year's competition looked a lot different for me personally — my role went from just a mechanical member to being the mechanical team lead. For me that meant taking a big step back; specifically, my goal shifted from my design and fabrication output to fostering a valuable design cycle for the three first-years under me on the team.
I spent more time planning with them on their individual contributions, coordinating larger design decisions with the electrical and software teams, and staying involved across processes for the entire team, not just mechanical.
While it was a difficult design cycle — taking 21 credits, working part time for MAAP, and communicating with every member of the team — I wouldn't have spent sophomore year doing anything else.
My Contributions
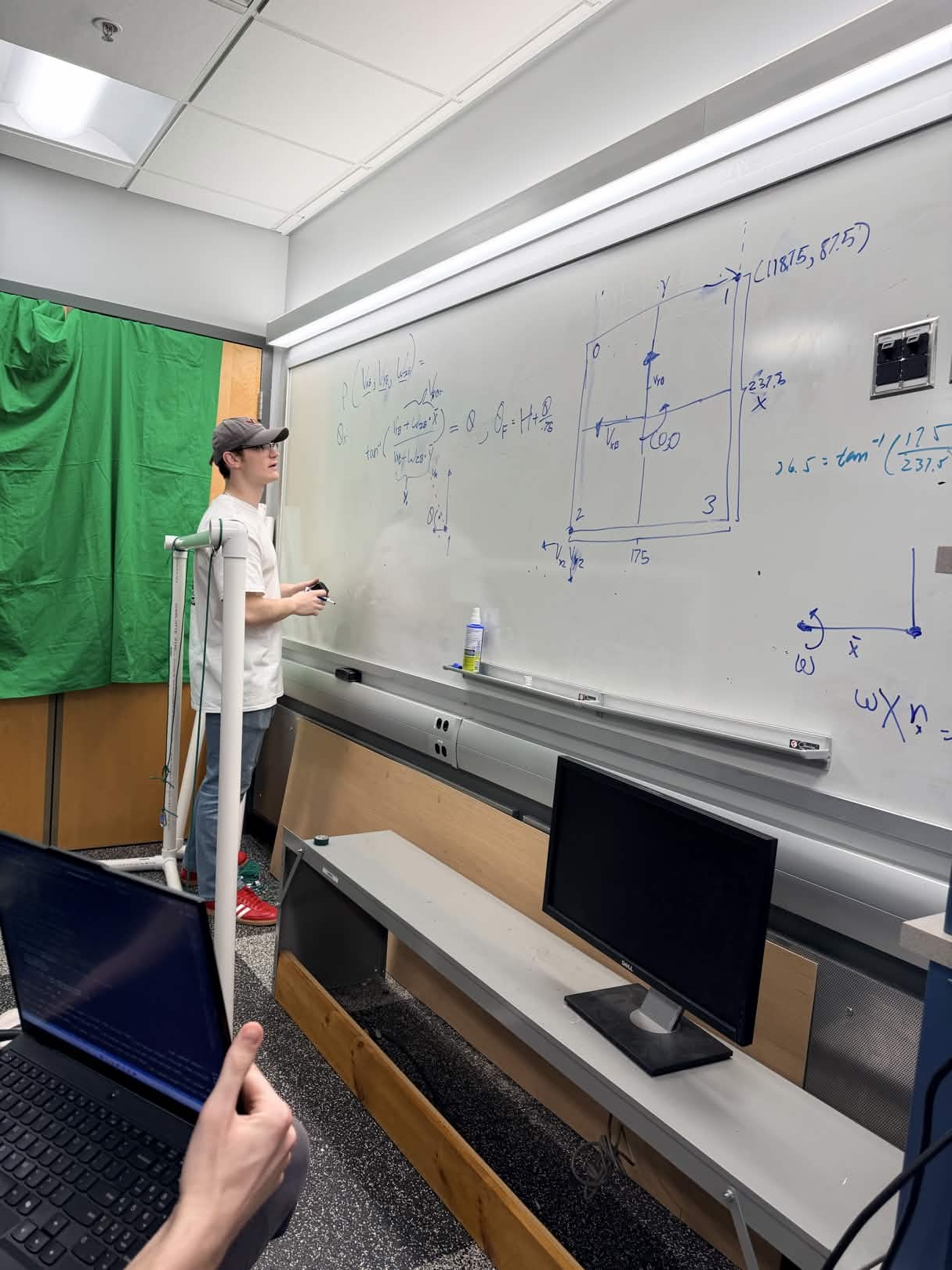
Late night lab session of nailing down the dynamics of the robot for the ankle's motor controller
I spent a lot more time planning and communicating than strict design work — here's a summary of my contributions:
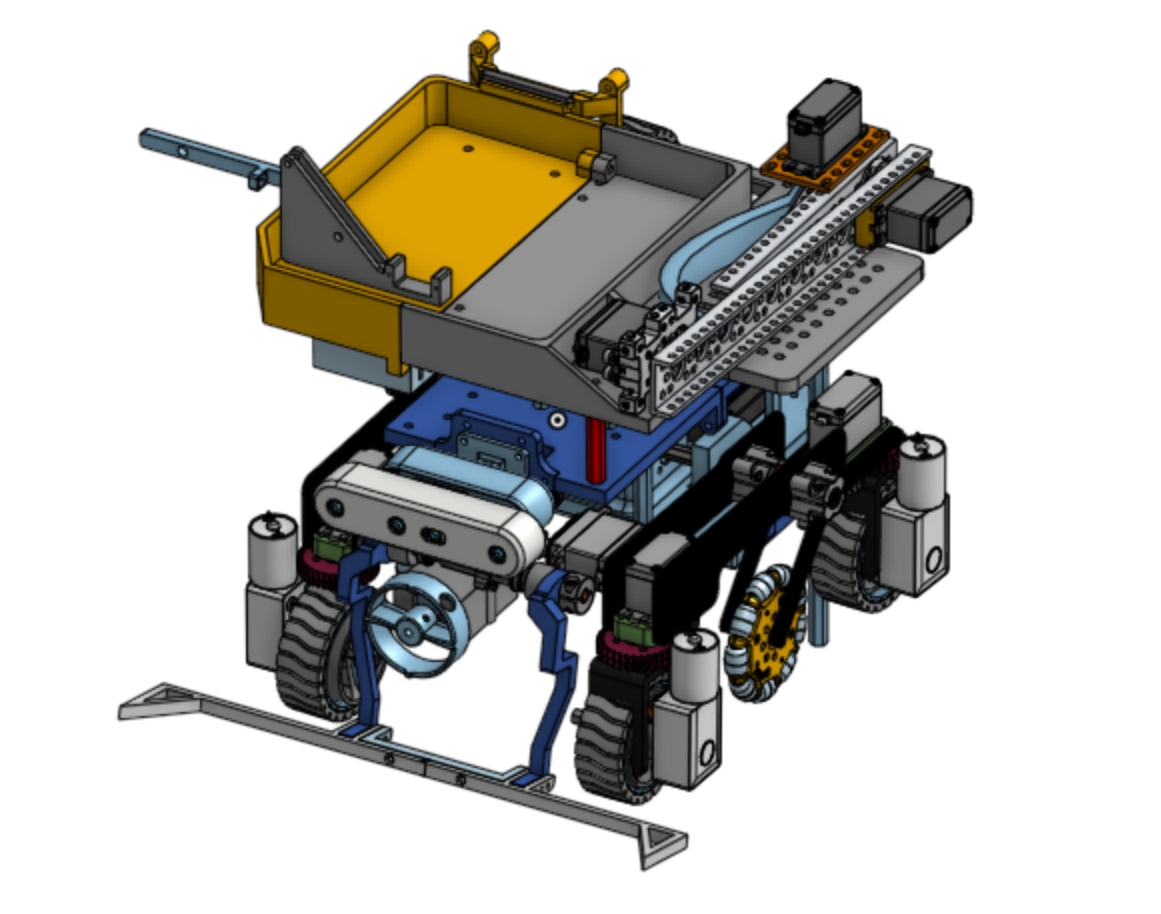
- Large-scale design for the fixed differential drive and rocker-bogie configuration
- Large-scale design for the pivotable ankles making up the "turtle drive" ability of the chassis (including point turns and strafing)
- Design of the front face integrating the fork system, adjustable camera mount, and crank adapter
- Design for the leveling system and general space management of all integrated computer and electrical PCBs
- Consistent meetings with software and electrical leads to meet mechanical constraints and criteria
- Aiding in software development of features related to mechanical construction and dynamics
Robot Details
Some robot details for those interested:
Mechanically
- In the center of the chassis is a fixed mechanical differential to keep the body level
- Each side features a rocker-bogie system to maneuver around the game field featuring a crater; the front and back ankles each have a servo motor for direction, and with the middle wheels slippable, the robot can point turn and strafe
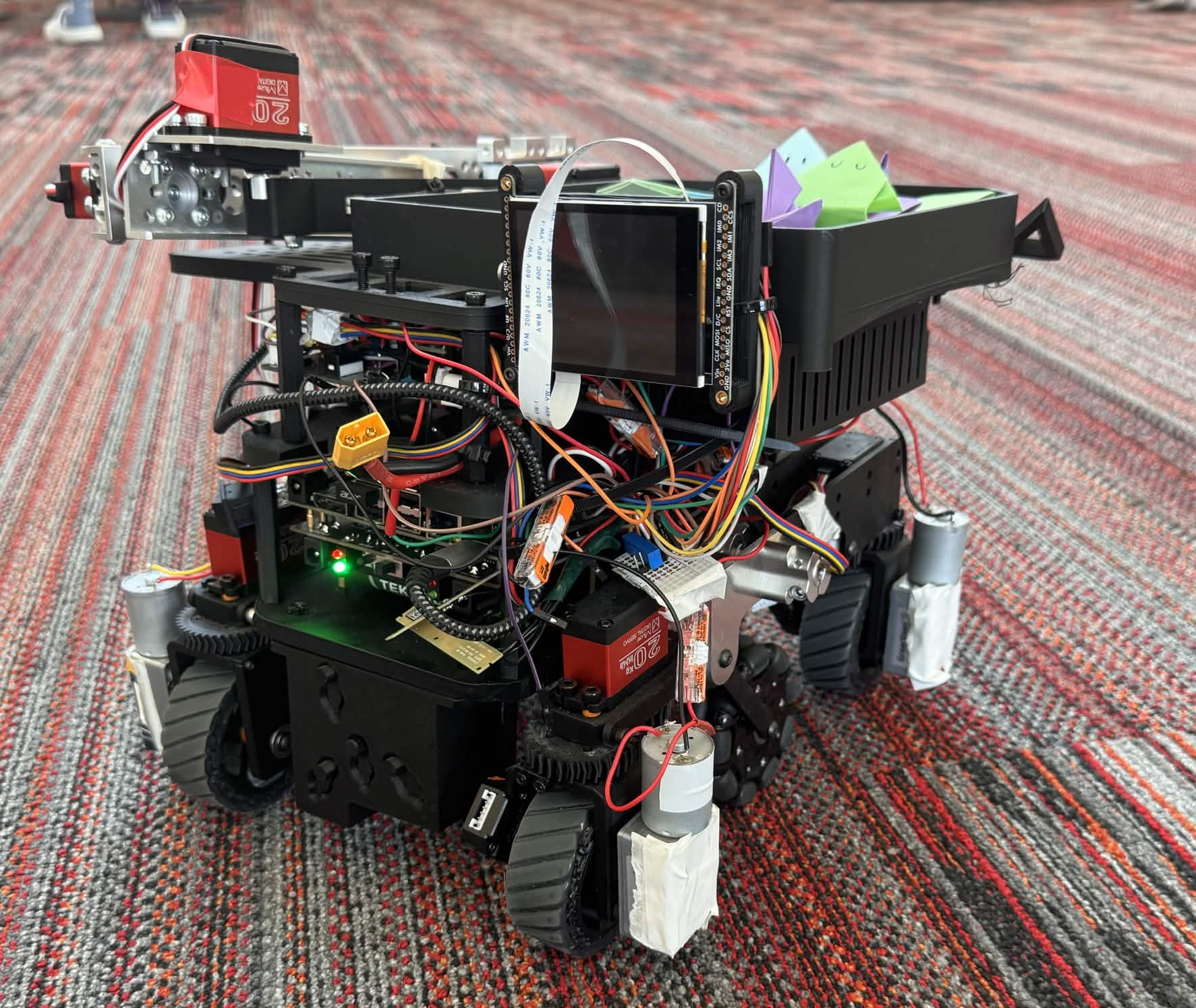
- The robot is equipped with multiple mechanical features for the game elements including the front fork, crank motor, mechanical keypad interface, and onboard 2DOF arm
Electrically
- Central 4-layer PCB communicating and commanding nine servo motors, four worm gear motors, and the external touch screen
- Nvidia Jetson with peripheral board for power, connected to the Intel RealSense Camera
- Slave Teensy microcontroller operating under the Jetson's command
Software and Autonomy
- Used Visual SLAM (nvblocks library) and integrated Odometry (wheel encoders) to localize the robot on an internal map created by scanning the standard game board
- Used ROS2 for the behavior tree dictating robot behavior and objectives