VT CRO — SEC Mechanical Team
Virginia Tech Competitive Robotics Organization · IEEE Southeastern Conference 2025
Overview
The Virginia Tech Competitive Robotics Organization (VT CRO) competes in nationally recognized competitions including the Southeastern Conference Robotics Competition hosted by IEEE. I was onboarded into the Mechanical sub-team during winter break of 2024.
Through this I gained experience in problem identification, mechanical design, rapid prototyping, and testing — all while considering constraints and timelines across Mechanical, Software, and Electrical sub-teams. I built confidence in OnShape's CAD and version control, and developed a strong understanding of Dead Wheel Odometry, AprilTag recognition, SLAM mapping, and ROS-based communication between our Teensy microcontroller and Nvidia Jetson.
The Challenge
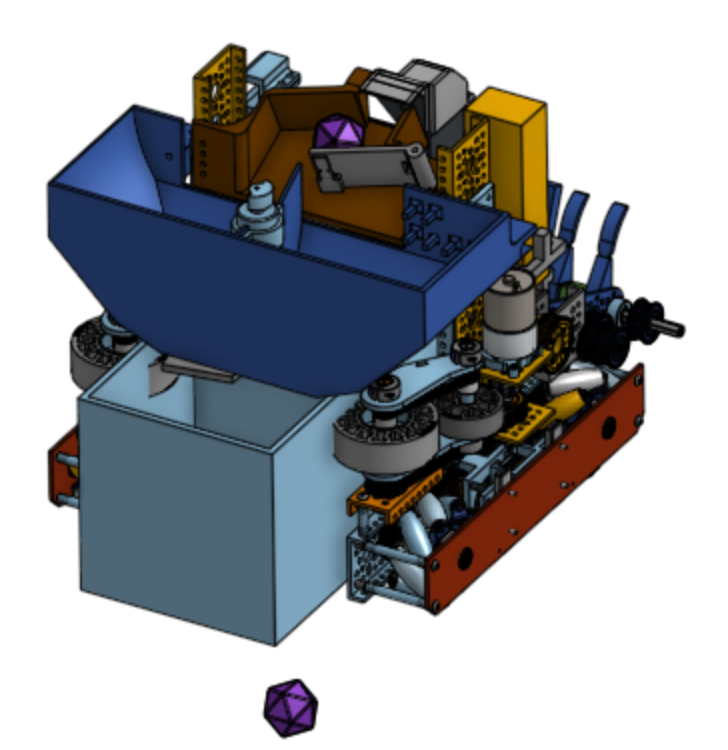
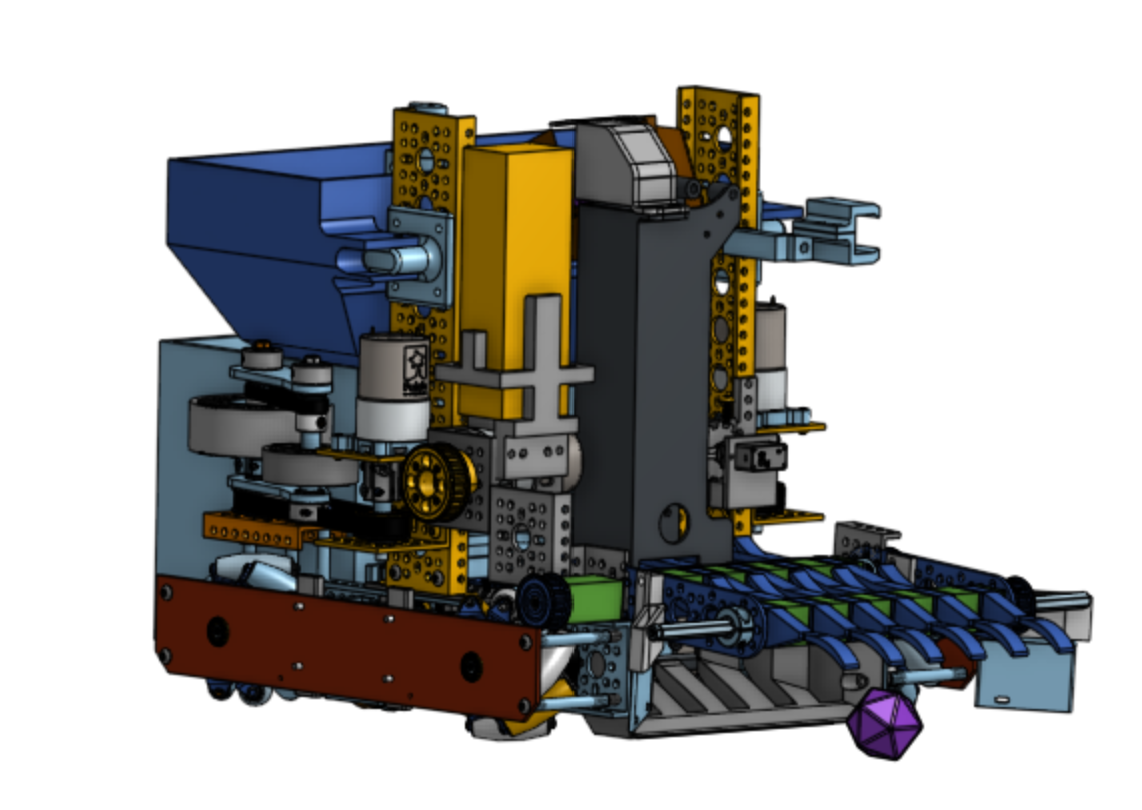
The robot was required to pick up, sort, and dispense two types of icosahedral particles — "Geodinium" (heavier) and "Nebulite" (lighter) — then identify storage bins and place them in designated map locations.
The robot's process followed six structured stages:
- Particle Intake — collecting icosahedral particles
- Particle Transportation — moving particles within the robot
- Particle Sorting — differentiating Geodinium from Nebulite
- Particle Storage — storing sorted particles appropriately
- Bin Intake — managing storage bins
- Particle and Bin Delivery — placing filled bins at map locations
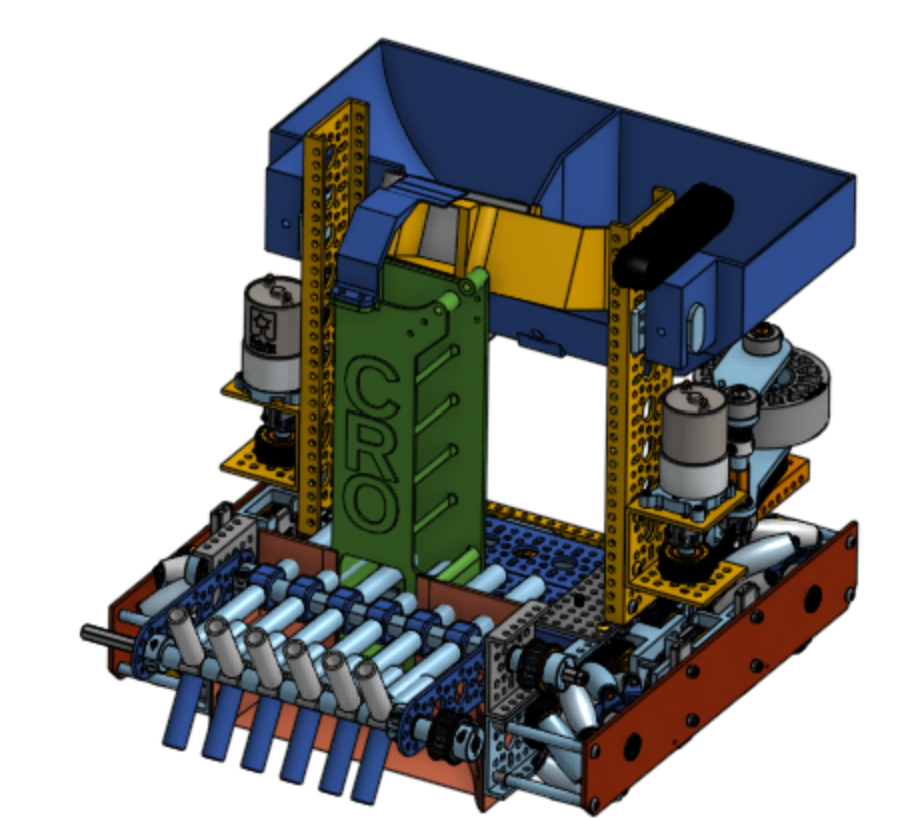
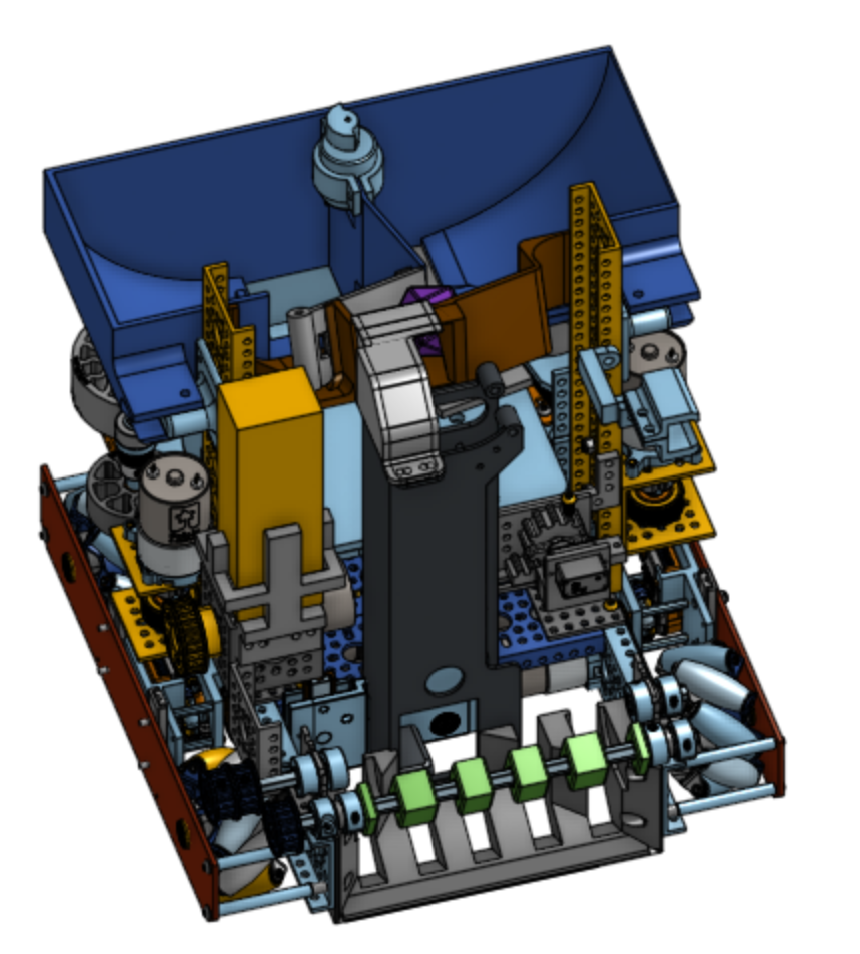
My Contributions
My personal contributions focused on mechanisms that interact with particles before and after the elevator transports them vertically:
- Particle intake "comb" ramp with flip-out dead zone blockers
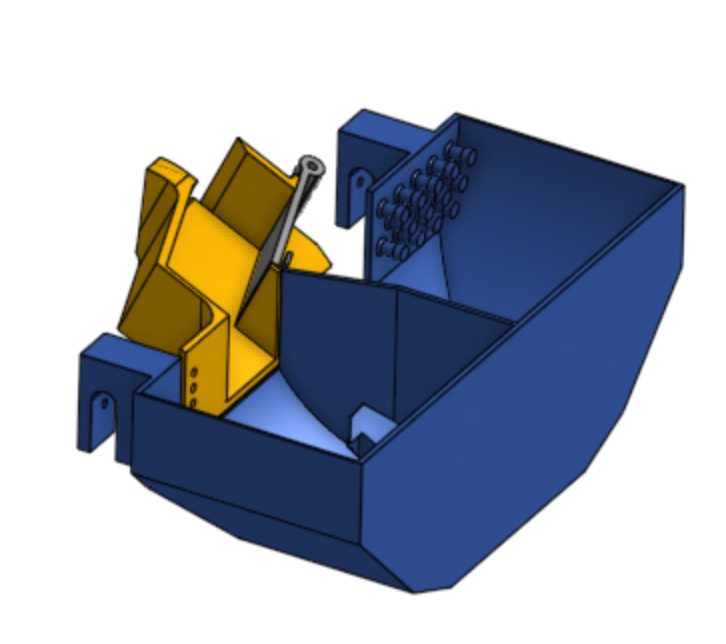
- Diagonal hopper sorter
- Storage bin design
- Delivery "flap" system
- Vibration module to prevent particle clogging
- Computer vision camera mount
- Robotic drawbridge arm payload system ("beacon")
- Central battery mount
Beyond direct design work I contributed to planning elevator head designs, particle intake mechanisms, component positioning, and team assignments. I emphasized modularity to enable faster prototyping and promoted effective cross-team communication.
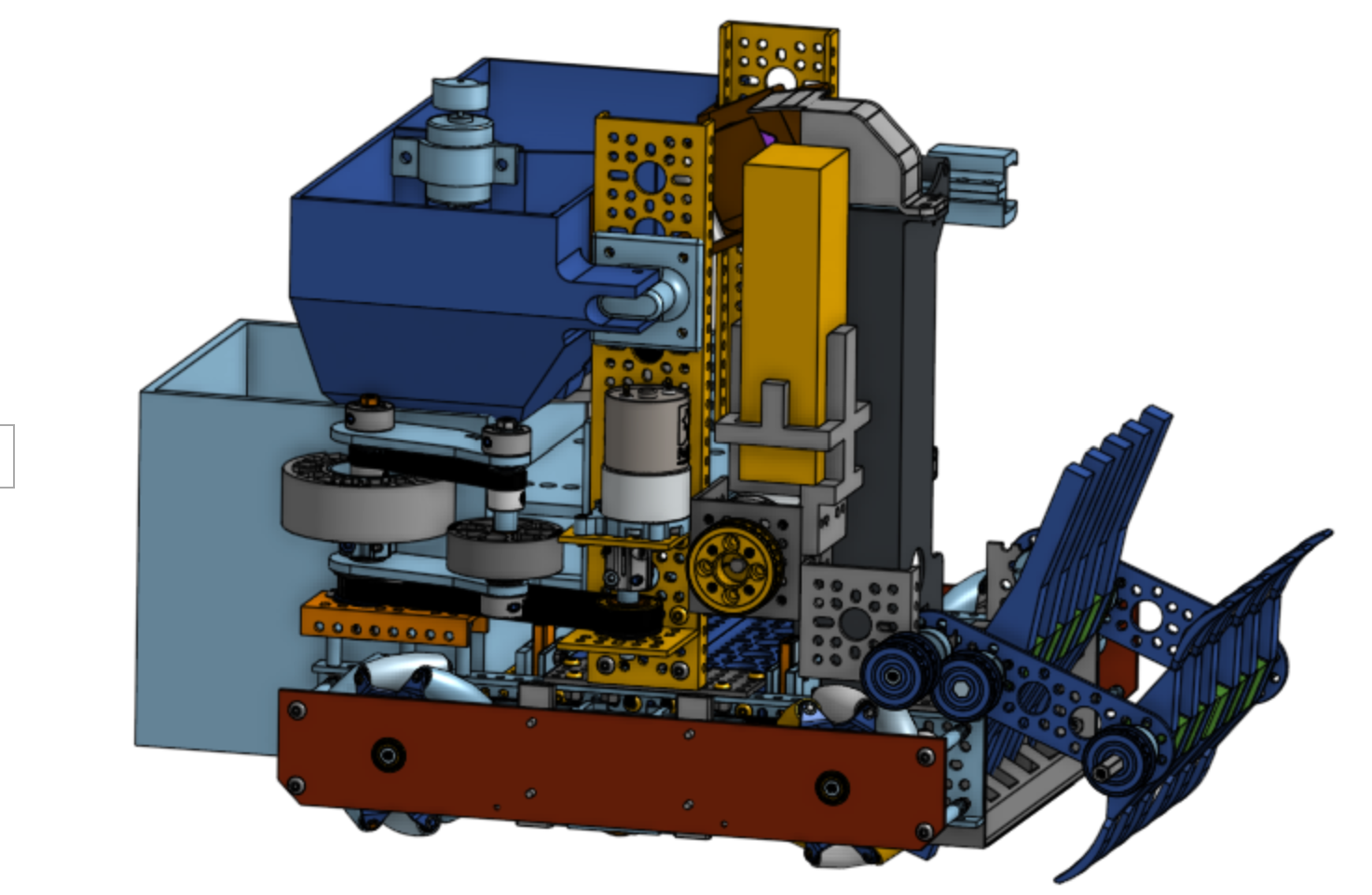
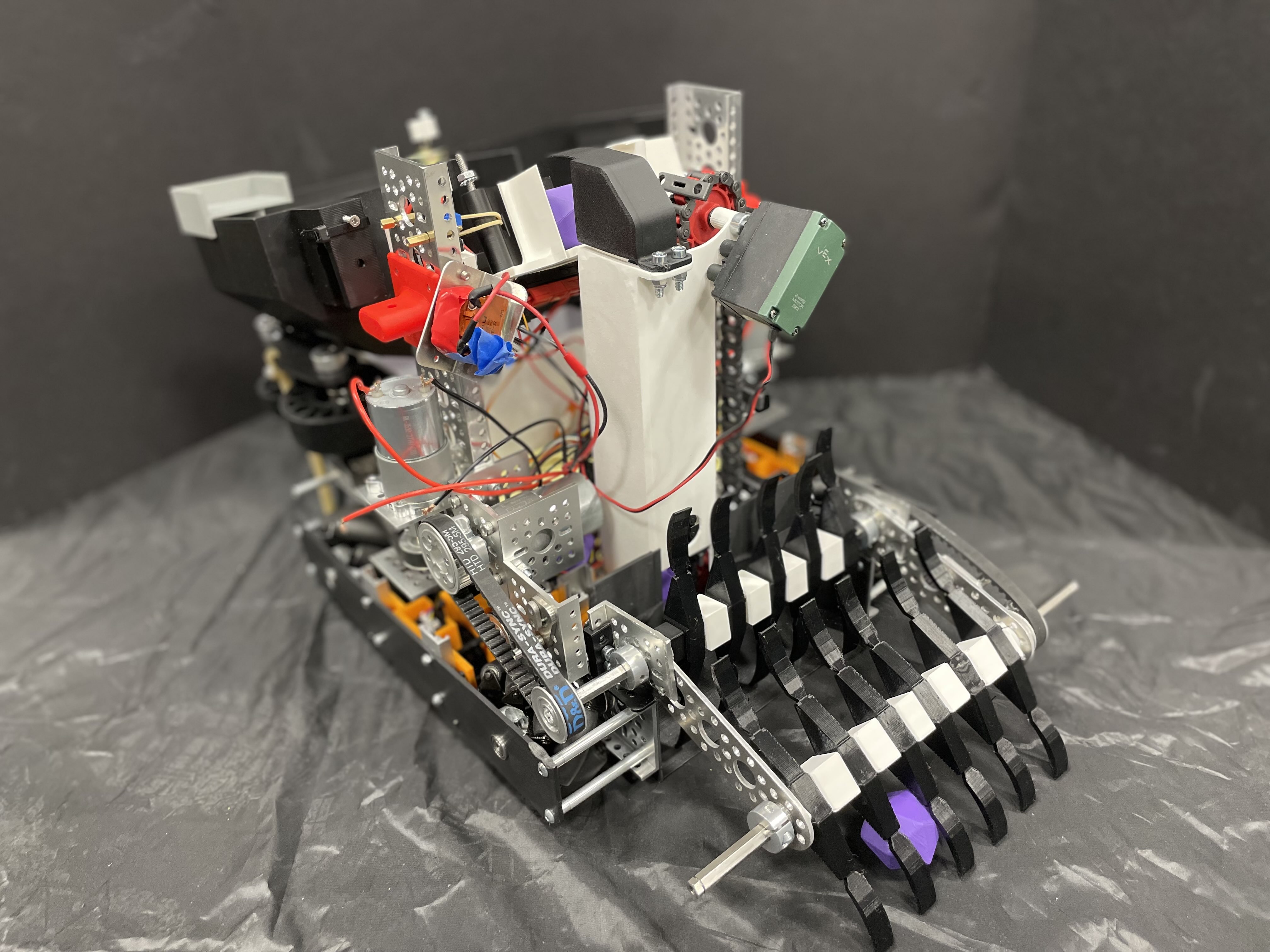
Robot Progression
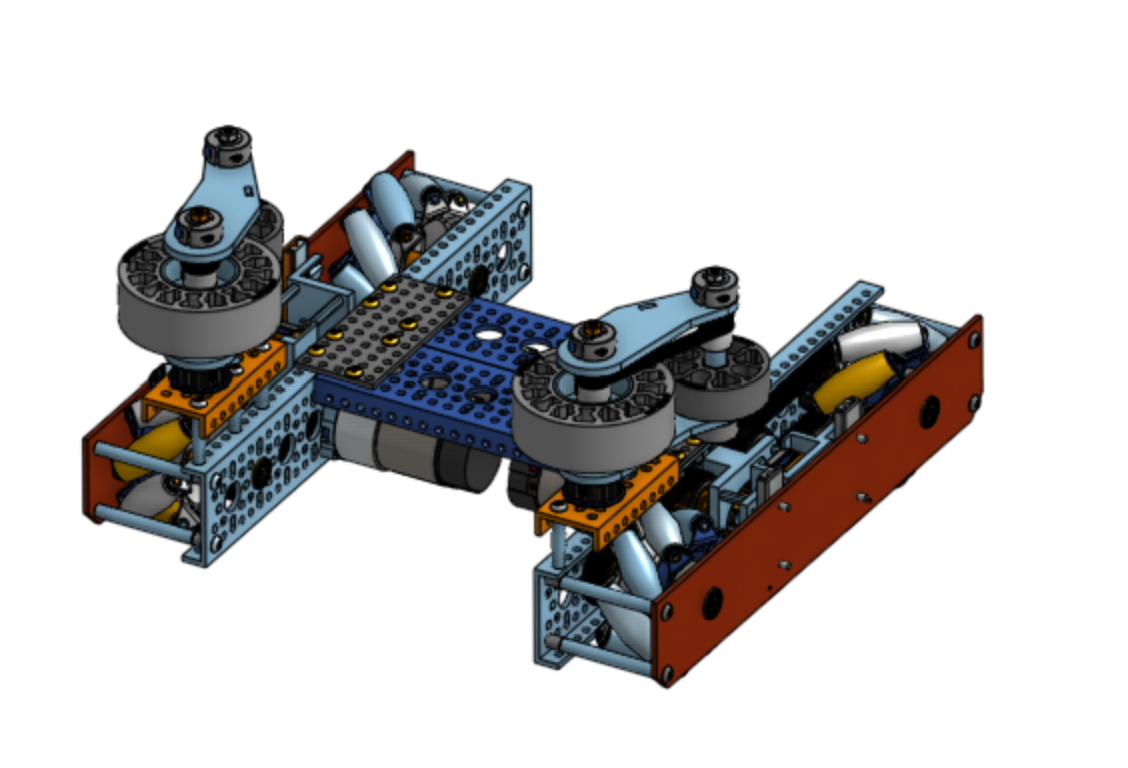
This is when I was onboarded