Novel Joint-Locking Arm — V1 & V2
A custom omni-directional locking joint system inspired by solder station support tools
Overview
This is one of my current personal projects exploring the design and use cases of a novel omni-directional locking joint. I was inspired by working with common solder station tools meant to stabilize objects or wires — wire-based supports always shift after being placed, and locking stations are slow when you need to adjust multiple joints.
I set out to create a support system that is as fast as a wire-based station but just as rigid as a locking system — tightened using a single string running through the joint itself.
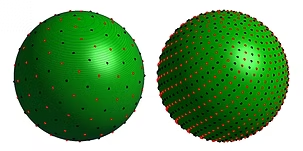
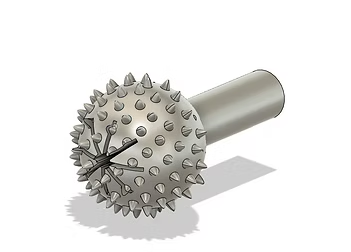
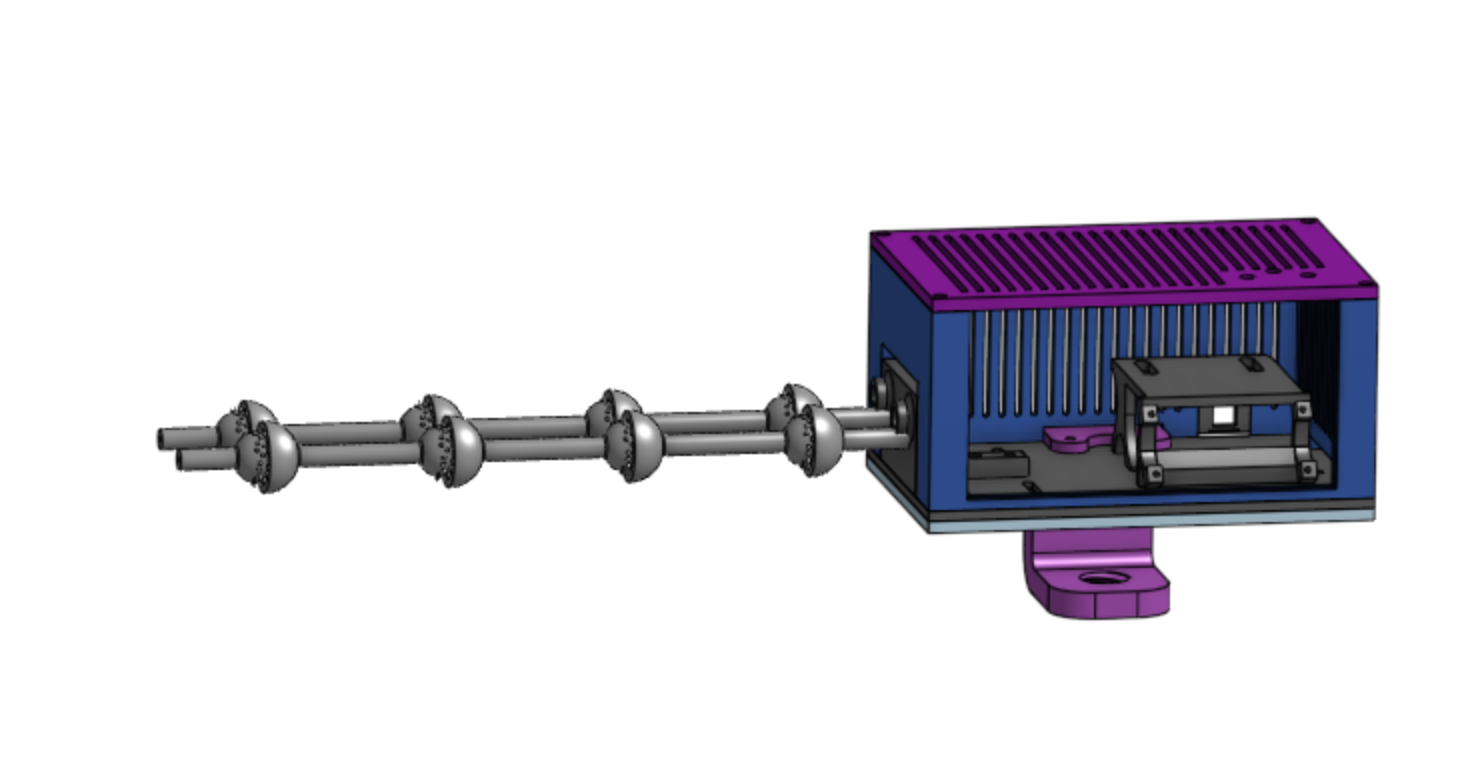
Joint Design — The Fibonacci Sphere
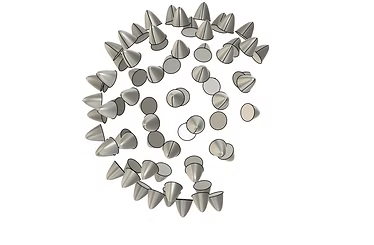
I needed a shape that looked the same from all angles. After iterating through many designs including advanced dodecahedrons and custom ball designs, I landed on the mathematics behind a Fibonacci sphere — a model where a sphere has equidistant points on its surface, making it the perfect model for the geometry I needed.
While the mathematical model has abundant online documentation, within the CAD community it is essentially non-existent. I created my Fibonacci-inspired joint using a custom Python script inside Fusion 360 that generated all the equidistant points and protrusion geometry.

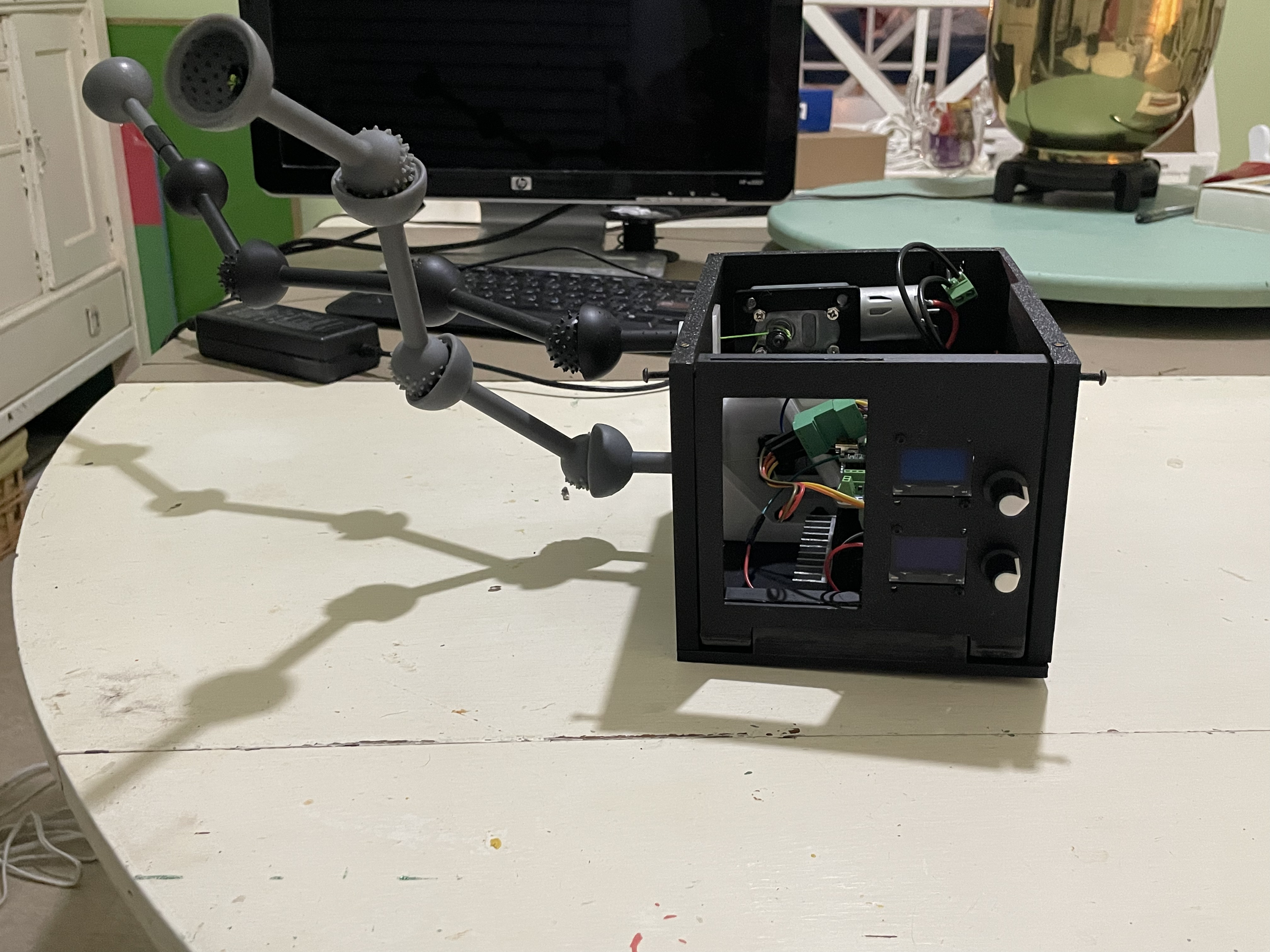
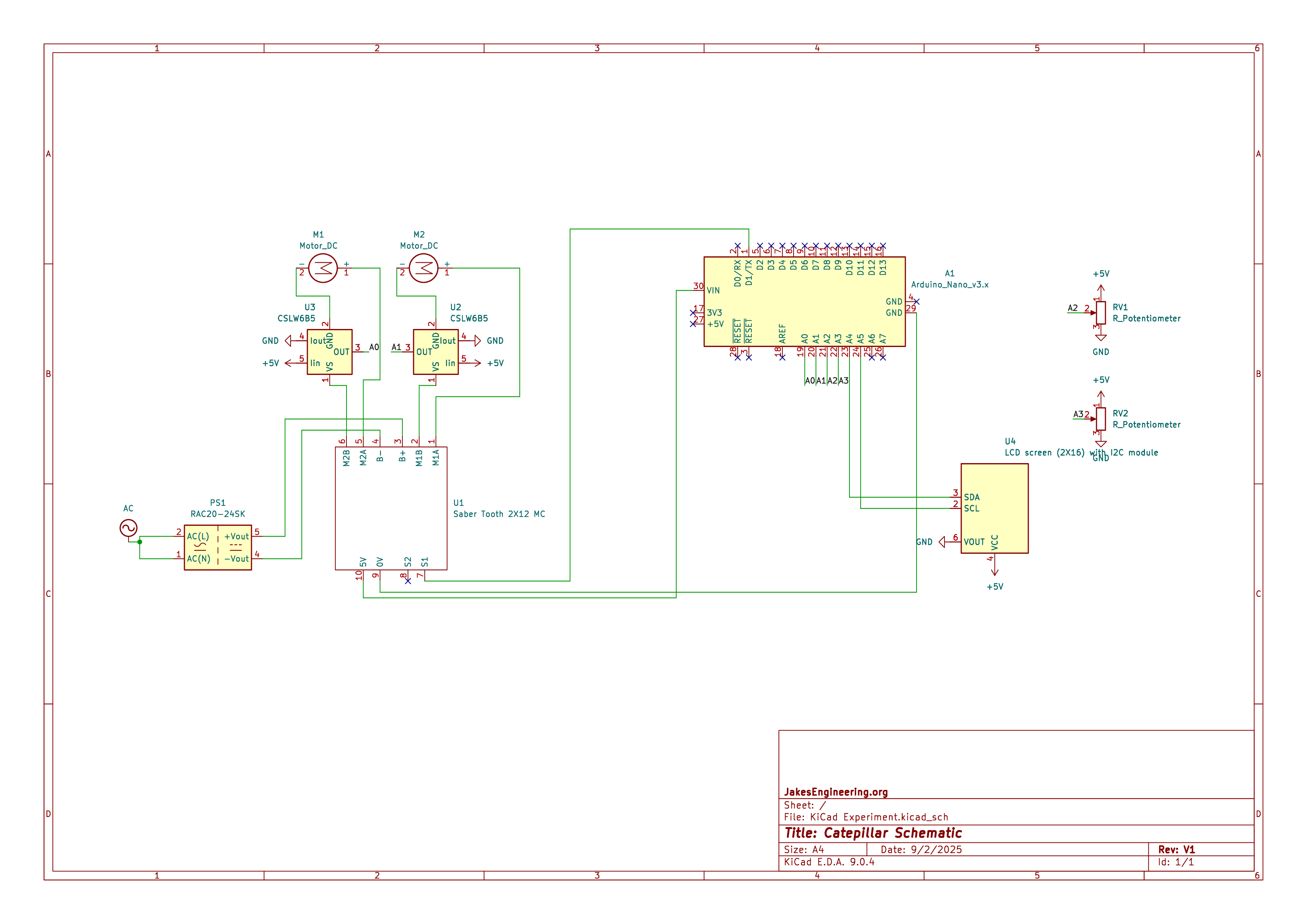
Version 1
After finishing the joint model I built the apparatus to generate string tension across two arms via easy user input. Version 1 used a Sabertooth 2X12 motor controller with two 12V worm motors, commanded by an Arduino Nano reading analog values from two potentiometers.
- Direct motor control via mounted potentiometers
- Displayed motor speeds and output
- See-through visual display
- Metal mounting with PETG arm mounts

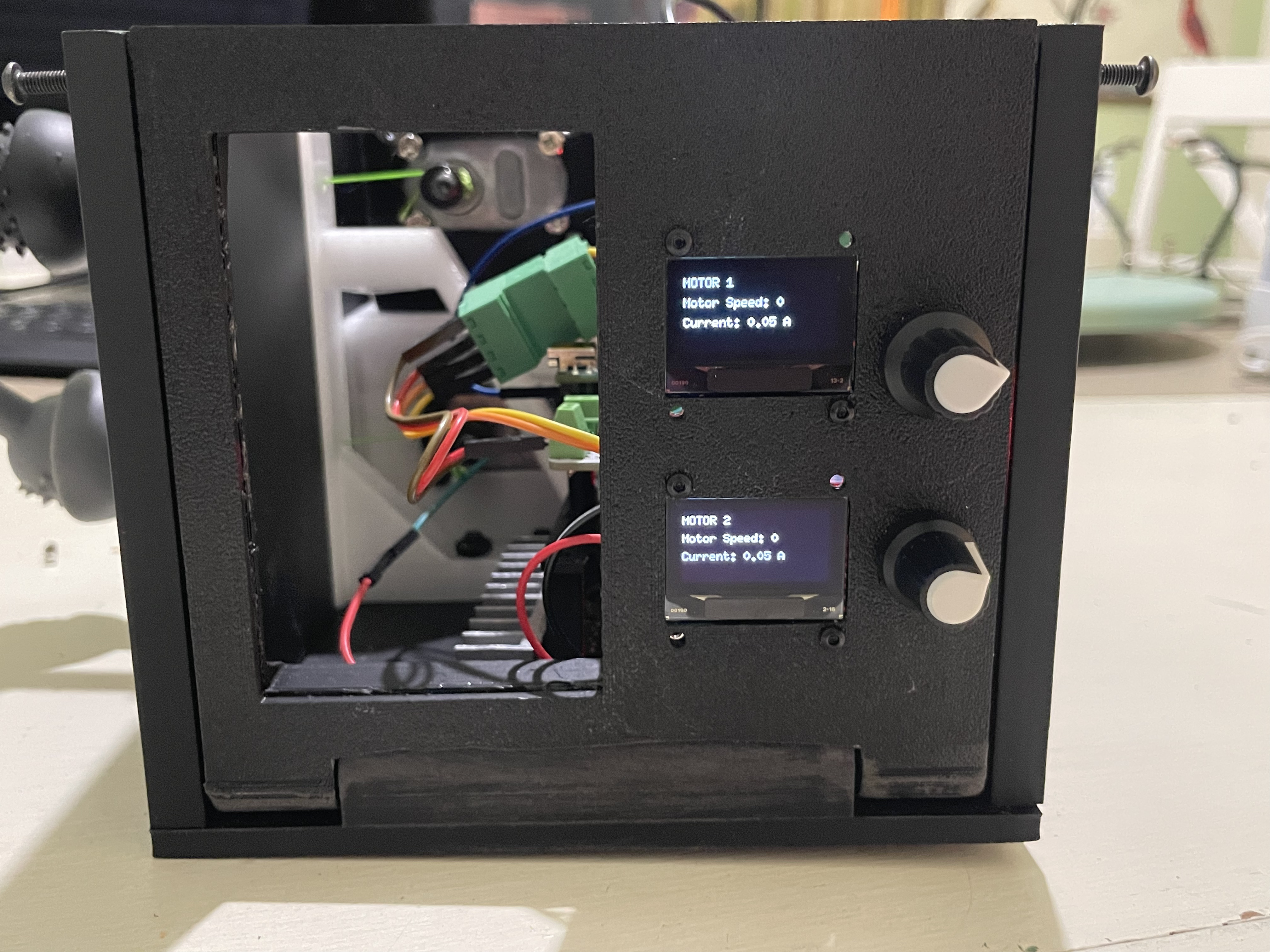
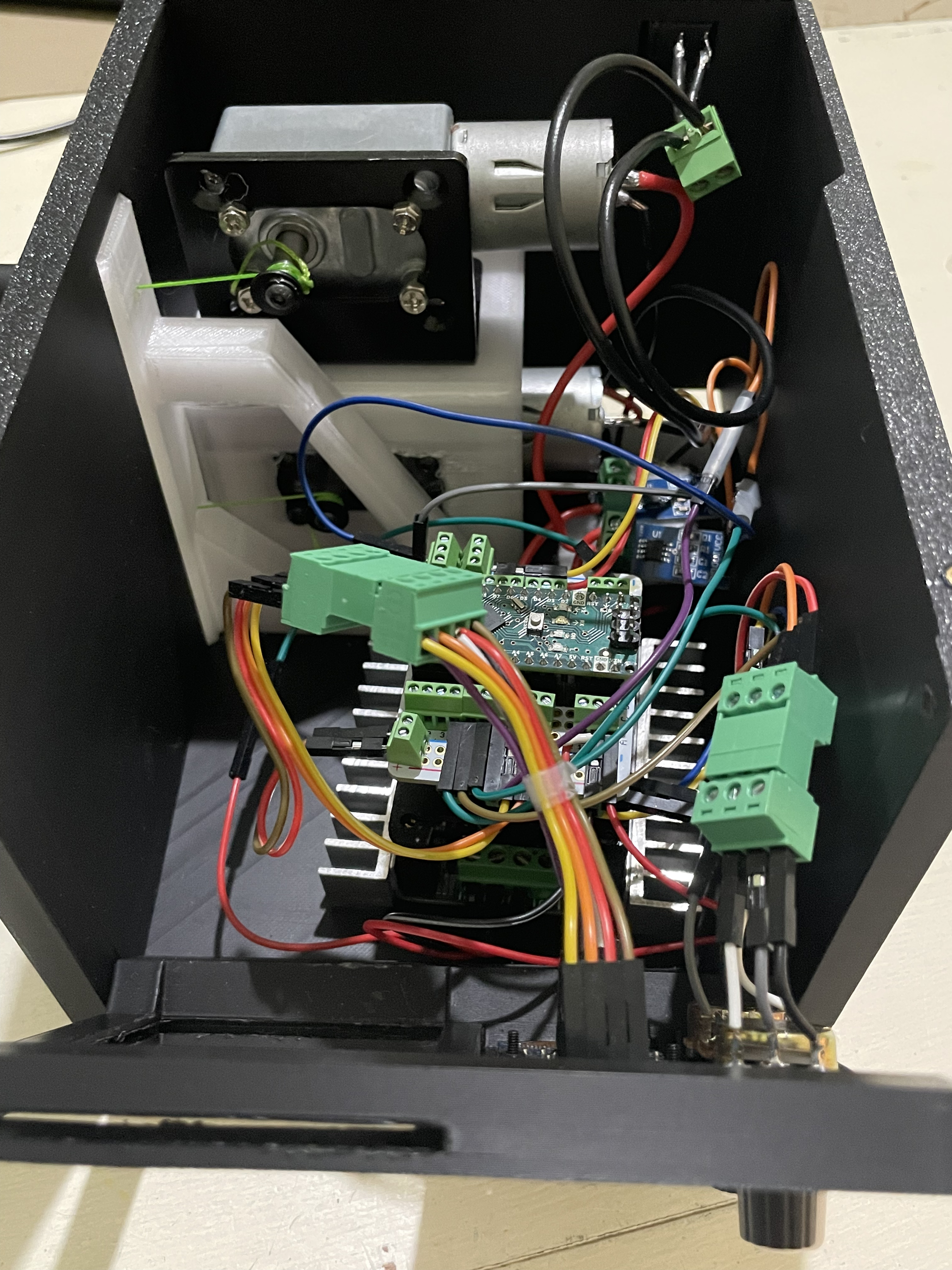
Version 2
Version 2 was a significant refinement in both electronics and form factor:
- Integrated ACS712 current sensors for monitoring and preventing motor stalls
- Dual OLED screen interface
- Custom soldered breakout board with screw terminal connections
- Half-sized form factor with more accessible and robust design
- 120 lb strength internal cord
Future V2 Additions
- Flashlight and gripper arm heads
- Vice system to secure the machine
- Opening screen animations